Šis ir pēdējais fragments no manas jaunās grāmatas “Neticami stāsti no kosmosa: skats uz aizkulisēm uz misijām, mainot mūsu skatījumu uz kosmosu”. Grāmatā ir apskatītas vairākas pašreizējās NASA robotizētās misijas, un šis fragments ir daļa no 3, kas ievietots šeit Space Magazine, 2. nodaļā “Marsa kustība ar zinātkāri”. Jūs varat lasīt 1. daļu šeit un 2. daļu šeit. Grāmata ir pieejama drukātā veidā vai e-grāmatā (iekurt vai Nook) Amazon un Barnes & Noble.
Kā vadīt Mars Rover
Kā Curiosity zina, kur un kā braukt pa Marsa virsmu? Jūs varētu iedomāties JPL inženierus, izmantojot kursorsviras, līdzīgas tām, kuras izmanto tālvadības rotaļlietām vai videospēlēm. Bet atšķirībā no RC braukšanas vai spēlēm, Mars rover vadītājiem nav tūlītējas vizuālās ieejas vai video ekrāna, lai redzētu, kur roveris dodas. Un tāpat kā nosēšanās laikā, vienmēr tiek kavēts laiks, kad komanda tiek nosūtīta komandai un kad tā tiek saņemta uz Marsa.
“Laika nobīdes dēļ tas nebrauc interaktīvā reāllaikā,” skaidroja Džons Maikls Morookians, kurš vada braucēju komandu.
Morookian un viņa komandas faktiskais amata nosaukums ir “Rover Planners”, kas precīzi raksturo viņu darbu. Tā vietā, lai “vadītu” apvidus autovadītājus, viņi iepriekš izplāno maršrutu, programmē specializēto programmatūru un augšupielādē instrukcijas Curiosity.
"Mēs izmantojam attēlus, ko uzņēmis tā apkārtnes ceļvedis," sacīja Morookians. “Mums ir stereo attēlu komplekts no četrām melnbaltām navigācijas kamerām kopā ar attēliem no Hazcams (risku novēršanas kamerām), ko atbalsta augstas izšķirtspējas krāsaini attēli no MastCam, kas sniedz mums informāciju par reljefa raksturu priekšā un norādes par iežu un minerālu veidiem objektā. Tas palīdz identificēt struktūras, kas zinātniekiem šķiet interesantas. ”
Izmantojot visus pieejamos datus, viņi var izveidot reljefa trīsdimensiju vizualizāciju, izmantojot specializētu programmatūru ar nosaukumu Rover Sequencing and Visualization Program (RSVP).
"Tas būtībā ir Marsa simulators, un mēs ievietojām simulētu Curiosity ainas panorāmā, lai iztēlotos, kā roveris varētu iet pa savu ceļu," paskaidroja Morookians. “Mēs varam arī uzlikt stereo brilles, kas ļauj mūsu acīm redzēt ainu trīs dimensijās, it kā mēs tur atrastos ar roveru.
Virtuālajā realitātē roveru vadītāji var manipulēt ar notikuma vietu un roveriem, lai pārbaudītu visas iespējas, kuri maršruti ir labākie un no kādiem apgabaliem vajadzētu izvairīties. Tur viņi var pieļaut visas kļūdas (iestrēgt kāpā, iestumt roveru, ietriekties lielā klintī, nobraukt no ceļa) un pilnveidot braukšanas secību, kamēr īstais roveris uz Marsa paliek drošs.
“Zinātnieki arī izskata attēlus, lai atrastu interesantas funkcijas, un konsultējas ar Rover Planners, lai palīdzētu noteikt ceļu. Tad mēs sastādām detalizētas komandas, kas ir vajadzīgas, lai pa šo ceļu iegūtu ziņkārību no punkta A līdz punktam B, ”sacīja Morookians. "" Mēs varam iekļaut arī komandas, kas vajadzīgas, lai roveram būtu virziens, lai izveidotu kontaktu ar vietni, izmantojot tā robotu. "

Tātad katru nakti roverim ir pavēlēts apstāties uz astoņām stundām, lai ar kodolģeneratoru uzlādētu akumulatorus. Bet vispirms Curiosity nosūta datus uz Zemi, ieskaitot reljefa attēlus un visu zinātnes informāciju. Uz Zemes Rovera plānotāji ņem šos datus, veic plānošanas darbus, pabeidz programmatūras programmēšanu un pārraida informāciju atpakaļ uz Marsu. Tad Curiosity pamostas, lejupielādē instrukcijas un sāk darboties. Un cikls atkārtojas.
Ziņkārībai ir arī funkcija AutoNav, kas ļauj braucējam šķērsot apgabalus, kurus komanda vēl nav redzējusi attēlos. Tātad, tas varētu aiziet pāri kalnam un lejup pa otru pusi uz neatklātu teritoriju, ar AutoNav uztverot iespējamos draudus.
"Mēs to nelietojam pārāk bieži, jo tas ir skaitliski dārgs, tas nozīmē, ka rovera darbībai šajā režīmā ir nepieciešams daudz ilgāks laiks," sacīja Morookians. "Mēs bieži uzskatām, ka labāka tirdzniecība ir tikai ienākt nākamajā dienā, apskatīt attēlus un braukt tik tālu, cik mēs redzam."

Kad Morookians man parādīja dažādās telpas, kuras izmantoja roveru plānošanas komandas JPL, viņš paskaidroja, kā tām jādarbojas vairākos dažādos laika periodos.
"Mums ir ne tikai ikdienas maršruta plānošana," viņš teica, "bet arī veic liela mēroga stratēģisko plānošanu, izmantojot Orbital attēlus no HiRISE kameras Marsa izlūkošanas orbiterā, un izvēlēties ceļus, balstoties uz orbītā redzamajiem elementiem. Mūsu komanda strādā stratēģiski, ilgus mēnešus meklējot labākos ceļus. ”
Cits process, ko sauc par Supra-Tactical, paredzēts tikai nākamajai nedēļai. Tas ietver zinātnes plānotājus, kas pārvalda un uzlabo darbības veidus, ko rovers veiks īstermiņā. Turklāt, tā kā neviens no komandas locekļiem vairs nedzīvo pēc Marsa laika, piektdienās Rover Planners izstrādā plānus vairākām dienām.
"Tā kā mēs nestrādājam nedēļas nogalēs, piektdienas plāni satur vairākas aktivitātes," sacīja Morookians. "Divas paralēlas komandas izlemj, kurās dienās rovers brauks un kurās dienās veiks citas darbības, piemēram, strādās ar robotizēto roku vai citiem instrumentiem."
Dati, kas nedēļas nogalē nonāk no rovera, tiek uzraudzīti, un, ja rodas problēmas, tiek aicināta komanda veikt sīkāku novērtējumu. Morookians norādīja, ka viņiem vairākas reizes bija jāiesaista ārkārtas nedēļas nogales komanda, taču līdz šim nopietnas problēmas nav radušās. "Tomēr tas tur mūs uz pirkstgaliem," viņš teica.
Roverim ir vairākas reaktīvās drošības pārbaudes attiecībā uz rovera klāja kopējo slīpumu un riteņu balstiekārtas artikulāciju, tāpēc, ja roveris dodas pāri objektam, kas ir pārāk liels, tas automātiski apstāsies.
Ziņkārība netika uzcelta ātrumam. Tas bija paredzēts, lai dienā varētu nobraukt līdz 660 pēdām (200 metriem), taču tas reti brauc tik tālu Solā. Līdz 2016. gada sākumam robots bija nobraucis apmēram 12 km (7,5 jūdzes) pa Marsa virsmu.

Ir vairāki veidi, kā noteikt, cik tālu Curiosity ir nobraucis, taču visprecīzākais mērījums tiek saukts par “Visual Odometry”. Curiosity riteņos ir specializēti caurumi Morzes koda burtu formā, uz kuriem ir rakstīts “JPL” - pamāšana mājām. no Rovera zinātnes un inženieru komandām - pāri Marsa augsnei.
"Vizuālā odometrija darbojas, salīdzinot jaunākos stereo attēlu pāri, kas savākti aptuveni uz metru virs piedziņas," sacīja Morookians. “Atsevišķās ainas ainas tiek saskaņotas un izsekotas, lai nodrošinātu izmēru, kā kamera (un līdz ar to arī roveris) ir iztulkojusi un pagriezusies trīsdimensiju telpā starp diviem attēliem, un tas ļoti reālā nozīmē mums parāda, cik tālu ziņkārība ir aizgājusi. . ”
Rūpīga trases pārbaude var atklāt riteņu vilces veidu un to, vai tie ir paslīdējuši, piemēram, augsta slīpuma vai smilšainas zemes dēļ.
Diemžēl Curiosity riteņos tagad ir jauni caurumi, kas tur nebūtu vajadzīgi.
Rovera problēmas
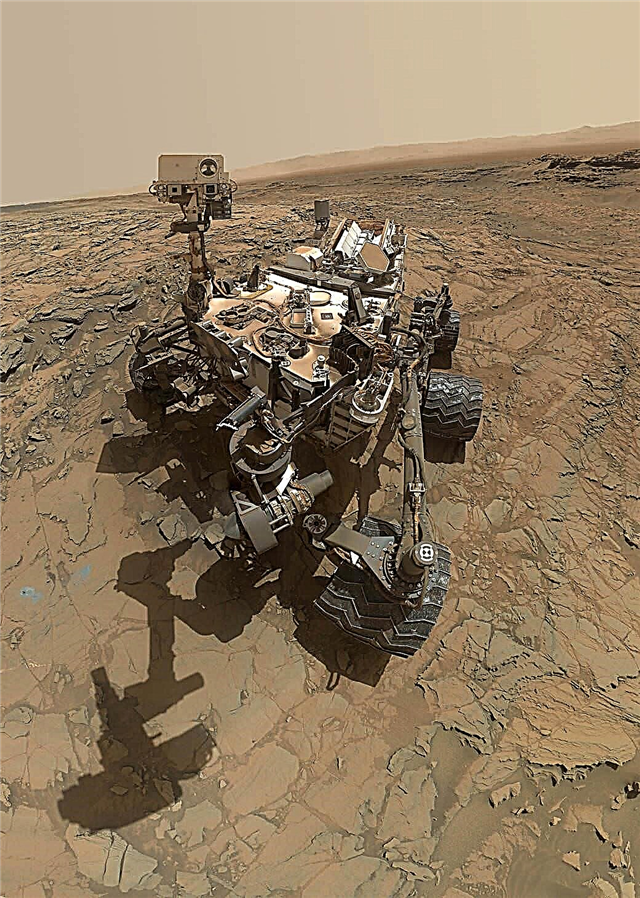
Gan morookietis, gan projekta zinātnieks Ešvins Vasavada izteica gandarījumu un gandarījumu, ka kopumā - tik tālu misijā esošais - zinātkāre ir diezgan veselīgs braucējs. Pašreiz visa zinātnes slodze darbojas ar gandrīz pilnu jaudu. Bet inženieru komanda seko acu uz dažiem jautājumiem.
“Ap sol 400 mēs sapratām, ka riteņi valkā ātrāk, nekā gaidījām,” sacīja Vasavada.

Un nodilums nesastāvēja tikai no maziem caurumiem; komanda sāka redzēt punkcijas un nejaukas asaras. Inženieri saprata, ka caurumus rada cietās, robainās klintis, kuras tajā laikā apdzina Rovers.
"Mēs pilnīgi negaidījām, ka būs“ smaili ”ieži, kas nodarīs postījumus,” sacīja Vasavada. “Mēs arī veica dažus testus un redzējām, kā viens ritenis varēja iestumt citu riteni klintī, padarot bojājumus vēl lielākus. Tagad mēs braucam uzmanīgāk un nebraucam tik ilgi, cik mums ir bijis pagātnē. Mēs esam spējuši izlīdzināt zaudējumus līdz pieņemamākam līmenim. ”
Misijas sākumā Curiosity dators vairākkārt nonāca “drošajā režīmā”, jo Curiosity programmatūra atzina problēmu, un reakcija bija liegt turpmākas darbības un pa tālruni nokļūt mājās.
Specializēta bojājumu novēršanas programmatūra darbojas pa visiem moduļiem un instrumentiem, un, kad rodas problēma, maršrutētājs apstājas un nosūta uz Zemes datus, ko sauc par “notikumu ierakstiem”. Ieraksti ietver dažādas steidzamības kategorijas, un 2015. gada sākumā rovers nosūtīja ziņojumu, kas būtībā teica: “Tas ir ļoti, ļoti slikti”. Urbējs uz rovera rokas bija pieredzējis elektriskās strāvas svārstības - kā īssavienojums.
"Curiosity programmatūrai ir spēja noteikt īssavienojumus, piemēram, zemējuma traucējumu ķēdes pārtraucēju, kas atrodas jūsu vannas istabā," paskaidroja Morookians, "izņemot šo, kurš jums saka, ka" tas ir ļoti, ļoti slikti ", nevis tikai dod dzeltenu gaismu."
Tā kā komanda nevar doties uz Marsu un novērst problēmu, viss tiek novērsts, nosūtot programmatūras atjauninājumus roverim vai mainot darbības procedūras.

"Mēs tagad esam tikai uzmanīgāki attiecībā uz to, kā mēs izmantojam urbi," sacīja Vasavada, "un sākumā nevajag urbt ar pilnu spēku, bet lēnām kāpj uz augšu. Tas ir tāpat kā tas, kā mēs braucam tagad, vēl saudzīgāk, bet tas tomēr ļauj paveikt darbu. Pagaidām tam nav bijusi liela ietekme. ”
Vieglāks pieskāriens sējmašīnai bija nepieciešams arī mīkstākajiem dubļakmeņiem un smilšakmeņiem, ar kuriem saskārās rovers. Morookians sacīja, ka pastāv bažas, ka slāņotās ieži, iespējams, neuzturēsies pret standarta urbšanas protokola uzbrukumu, un tāpēc viņi pielāgoja tehniku, lai izmantotu zemākos “iestatījumus”, kas joprojām ļauj urbim panākt pietiekamu progresu klintī.
Bet iespējas izmantot urbi palielinās, kad Curiosity sāk savu ceļu kalnā. Rovers dodas cauri tam, ko Vasavada dēvē par “mērķim bagātu, ļoti interesantu teritoriju”, jo zinātnes komanda strādā, lai sasaistītu ģeoloģisko kontekstu visam, ko viņi redz attēlos.
Līdzsvara atrašana uz Marsa
Kamēr novirzīšanās Dzeltenkifejas līcī ļāva komandai veikt dažus nozīmīgus atklājumus, viņi izjuta spiedienu nokļūt Mt. Asas, tāpēc “gadu brauca kā elle”, sacīja Vasavada.
Tagad kalnā joprojām ir spiediens maksimāli izmantot misiju ar mērķi to realizēt caur vismaz četrām dažādām klinšu vienībām - vai slāņiem - kalnā. Asas. Katrs slānis varētu būt kā nodaļa Marsa vēstures grāmatā.

“Izpētot Mt. Asums ir aizraujoši, ”sacīja Vasavada,“ un mēs cenšamies saglabāt sajaukumu starp tiešām lieliskajiem atklājumiem, kas - jūs ienīstat, ko teikt - palēnina mūs un kļūst arvien augstāk kalnā. Cieši apskatot priekšā esošu klints, tas nozīmē, ka jūs nekad nevarēsit apiet un apskatīt šo citu interesantu klints tur. ”
Gan Vasavada, gan Morookian teica, ka tas ir izaicinājums saglabāt šo līdzsvaru katru dienu - atrast tā saukto “ceļgalu līkumā” vai “saldo vietu”, kas nodrošina perfektu optimizāciju starp braukšanu un apstāšanos zinātnes vajadzībām.
Tad ir līdzsvars starp apstāšanos veikt pilnīgu novērošanu ar visiem instrumentiem un “lidojuma zinātnes” veikšanu, ja tiek veikti mazāk intensīvi novērojumi.
"Mēs veicam novērojumus, kurus mēs varam, un ģenerējam visas hipotēzes, kuras mēs varam reālā laikā," sacīja Vasavada. "Pat ja mums paliek 100 atvērti jautājumi, mēs zinām, ka mēs varam atbildēt uz jautājumiem vēlāk, ja vien zinām, ka esam paņēmuši pietiekami daudz datu."
Ziņkārības galvenais mērķis nav augstākā līmeņa sanāksme, bet tā vietā ir reģions, kas atrodas apmēram 1 330 pēdas (400 metru) augšup, kur ģeologi cer atrast robežu starp akmeņiem, kas viņu vēsturē ir redzējuši daudz ūdens, un tiem, kas to nedarīja. Šī robeža sniegs ieskatu Marsa pārejā no mitras planētas uz sausu, aizpildot galveno plaisu planētas vēstures izpratnē.

Neviens īsti nezina, cik ilgi Curiosity ilgs, vai ja tas pārsteigs ikvienu, piemēram, tā priekšgājēji Gars un Iespēja. Pēc tam, kad tas ir izturējis viena gada “galvenā misija” uz Marsa (divi Zemes gadi) un tagad paplašinātajā misijā, viens liels mainīgais ir RTG enerģijas avots. Kamēr pieejamā jauda sāks stabili samazināties, gan Vasavada, gan Morookian neuzskata, ka tā būs problēma vēl vismaz četrus Zemes gadus, un ar pareizo “kopšanu” jauda varētu ilgt pārdesmit gadus vai ilgāk.
Bet viņi arī zina, ka nav nekādu iespēju paredzēt, cik ilgs būs ziņkārības laiks, vai kāds negaidīts notikums varētu beigt misiju.
Briesmonis
Vai Curiosity ir tāda personība kā iepriekšējie Marsa braucēji?
“Patiesībā nē, šķiet, ka mēs neiedomājamies antropomorizēt šo roveru, kā cilvēki to darīja ar Garu un Iespēju,” sacīja Vasavada. “Mēs neesam emocionāli ar to saistīti. Sociologi to faktiski ir pētījuši. ” Viņš ar uzjautrinātu smaidu papurināja galvu.
Vasavada norādīja, ka tam varētu būt kaut kas saistīts ar Curiosity lielumu.
"Es to domāju par milzu zvēru," viņš sacīja taisni. "Bet nebūt ne visai."

Vasavada sacīja, ka šīs misijas raksturošanai ir tās sarežģītība visās dimensijās: cilvēciskā sastāvdaļa, kas liek 500 cilvēkiem strādāt un sadarboties, vienlaikus optimizējot ikviena talantus; rovera drošība un veselība; un katru dienu darbina desmit instrumentus, kas dažreiz veic pilnīgi nesaistītus zinātnes uzdevumus.
“Katra diena ir mūsu pašu mazā“ septiņas terora minūtes ”, kur katru dienu ir jāiet tik daudz,” sacīja Vasavada. “Ir miljons potenciālu jautājumu un mijiedarbības, un jums pastāvīgi jādomā par visiem veidiem, kā viss var noiet greizi, jo ir miljons veidu, kā jūs varat sajaukt. Tā ir sarežģīta deja, bet par laimi mums ir lieliska komanda. ”
Tad viņš ar smaidu piebilda: "Šī misija tomēr ir aizraujoša, pat ja tas ir zvērs."
“Neticami stāsti no kosmosa: aizkulišu skats uz misijām, mainot mūsu skatu uz kosmosu” ir publicējis Makmillanas meitasuzņēmums Page Street Publishing.