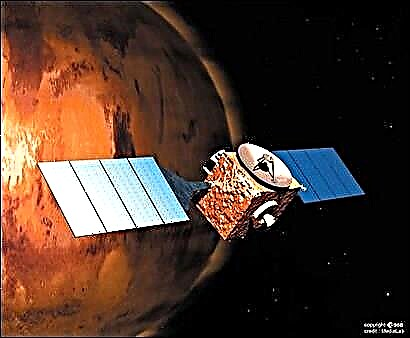
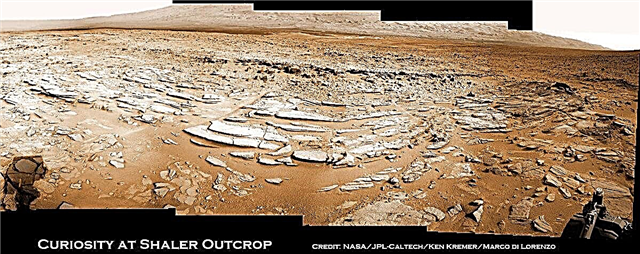
Attēla paraksts: Sol 120 krāsaina panorāma no lielā un satriecošā “Shaler” slāņainā klints atseguma, ko decembrī piešķīra Curiosity labās acs navigācijas kamera (Navcam). Apgrieztais skats sniedzas no ziemeļiem no kreisās uz dienvidiem pa labi. Nākotnes galamērķis Mount Sharp ir redzams fonā. Skatiet visu 2-D panorāmu zemāk un salīdziniet ar stereo efektu, kas pieejams no NASA 3D 3D panorāmas. Kredīts: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
NASA maršruts “Curiosity” atrodas uz pēdējiem soļiem, kad viņa nonākusi ģeologa paradīzē apgabalā ar nosaukumu “Yellowknife Bay”.
Pa ceļam pirms dažām dienām automašīnā Sol 120 (2012. gada 7. decembrī) viņa apstājās, lai pārbaudītu milzīgo slāņaino iežu atsegumu, sauktu par “Shaler”, un ar kameru Navcam un Mastcam uzņēma desmitiem augstas izšķirtspējas fotoattēlu.
Lai iegūtu cilvēka acu skatu uz elpu aizraujošo reljefu, ko daži varētu dzirdēt par “negaidītu braucienu”, apskatiet mūsu Sol 120 fotoattēlu mozaīku 2-D (iepriekš) un pēc tam salīdziniet to ar NASA 3D-mozaīku (zemāk). . Lai pilnībā izmantotu Curiosity krāšņo apkārtni un priekšlaicīgo ēnu, jums būs jāizsvīkst sarkanā ciāna anaglyph brilles un varat uzminēt, kas tas ir?
“Shaler” atsegumam raksturīgs pārsteidzošu slāņu pārpilnība, kas viens pret otru ir leņķiski, ģeoloģi to dēvē par “krustošanos”.
Komanda arī izmantoja Curiosity's Chemistry and Camera (ChemCam) instrumentu uz rovera masta, lai palīdzētu novērtēt “Shaler” saturu.
Strauji tuvojoties Ziemassvētku brīvdienām, rover zinātnes komanda meklē piemērotu vietu Yellowknife līcī, lai izvēlētos par pirmo potenciālo mērķi, kurš jāizmanto ar Curiosity uzlaboto sitaminstrumentu palīdzību.
Pēc tam viņa piegādās pulverveida iežu paraugus CheMin un SAM miniatūru analītiskās ķīmijas laboratoriju duetam uz roversu klāja, lai noskaidrotu neorganisko minerālu sastāvu, kā arī mēģinātu noteikt, vai ir kādas organiskas molekulas.

Attēla paraksts: Pilnīga Sol 120 krāsaina panorāma uz lielā “Shaler” slāņainā klints atseguma, ko decembra mēnesī uzņēma Curiosity labās acs navigācijas kamera (Navcam). Skats atrodas no ziemeļrietumiem no kreisās uz dienvidrietumiem pa labi. Izpētiet šo pilnu divdimensiju panorāmu un salīdziniet to ar stereo efektiem, kas pieejami no NASA trīsdimensiju panorāmas. Kredīts: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo

Attēla paraksts: Sol 120 stereo panorāmas skats no 'Shaler' klinšu atseguma, ko decembris uzsit ar labās un kreisās acs navigācijas kameru (Navcam). Skats aptver no ziemeļrietumu rietumiem pa kreisi uz dienvidiem uz dienvidrietumiem un pa labi. cilindriskas perspektīvas projekcija. Kredīts: NASA / JPL-Caltech
Yellowknife līcis atrodas vietā, ko sauc par “Glenelg”, kas ir pirmais nozīmīgais zinātnes galamērķis. Glenelgs unikāli atrodas trīs dažādu veidu krustojošu ģeoloģisko pazīmju krustojumā, kas palīdzēs atšķetināt Curiosity Gale krātera piestātnes zonas noslēpumus blakus humongozajam kalnam, kas pazīstams kā Mount Sharp - misijas galvenais mērķis.
Pēc drošas izdzīvošanas no mokošās piezemēšanās pie “Bradbury Landing” 6. augustā, apvidus auto lieluma Curiosity rover ir nonācis rullī, lai pirms Ziemassvētkiem sasniegtu aicinošo “Glenelg” iekšējo reljefu.
Robots ar sešiem riteņiem līdz šim ir nobraucis vairāk nekā 0,37 jūdzes (598 metrus) un tagad brauc pa visgrūtāko un zinātniski izdevīgāko reljefu visa četru mēnešu brauciena laikā.
"Rovers pārvietojas pa reljefu atšķirīgi no tā, kur tas ir braucis agrāk, un reaģē atšķirīgi," sacīja Riks Velcs, NASA reaktīvo spēku laboratorijas misijas vadītājs Pasadena, Kalifornijā. "Mēs turpinām progresu, lai arī mēs joprojām atrodamies mācību posms ar šo roveru, šajā reljefā dodoties nedaudz lēnāk, nekā mēs varētu vēlēties, ka mēs varētu. ”
Ziņkārība vismaz vairākas nedēļas pavadīs, rūpīgi izpētot Dzeltenkifejas līci, pirms apgriezt kursu un doties gada garumā 6 jūdžu (10 km) pārgājienā uz Sharp kalna lejteci. Pa ceļam zinātnes komanda, iespējams, vēlēsies atkārtoti izpētīt Šīlera un Hoitas atsegumus, izmantojot Rovera komplektu ar 10 vismodernākajiem zinātnes instrumentiem.

Attēla paraksts: Curiosity Traverse Map, Sol 123 (2012. gada 10. decembris). Šajā kartē redzamas vietas, kur NASA Marsa maršrutētājs Curiosity brauca starp nosēšanos vietā, kuras nosaukums ir “Bradbury Landing”, un pozīciju, kas tika sasniegta misijas 123. Marsa dienā jeb solā (2012. gada 10. decembrī) “Dzeltenkifejas līcī” tajā vietā, ko sauc par 'Glenelg'. Kredīts: NASA / JPL-Caltech / Univ. no Arizonas