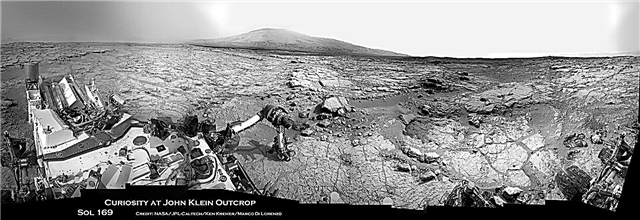
Attēla uzraksts: ziņkārība veiks vēsturisko 1. urbumu Marsa klintī šajā vietā, kur robotizētā roka nospiež uz Sarkanās planētas virsmu Džona Kleina atsegumā, kur atrodas veinēti hidratēti minerāli. Šī Navcam kameru attēlu panorāmas fotoattēlu mozaīka tika uzlikta 2013. gada 25. un 26. janvārī vai Sols 168 & 169, un tajā parādīts ziņkārības pašportrets, kas dramatiski fonēts ar viņas galīgo galamērķi - Mount Sharp. Kredīts: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
NASA Curiosity Mars Science Lab (MSL) maršrutētājs, ja viss norit labi, paredz, ka ilgi gaidītais un vēsture, kurā pirmo reizi tiek izmantots urbis uz Marsa, notiks ceturtdien, 2013. gada 31. janvārī vai Sol 174. USGS loceklis Kens Herkenhofs.
Pirmā ziņkārības urbšanas operācija nozīmē, ka testa urbums tiek ierauts līdzenā klintī vietā, kur pašlaik roveris ir novietots zinātniski interesantā klinšu atsegumā ar verenerāliem, ko sauc par “John Klein”. Skatiet mūsu mozaīkas virs un zemāk, parādot Curiosity pašreizējo atrašanās vietu.
"Šajā pārbaudē urbšanas urbumi netiks savākti, jo tiks izmantots tikai sitamās (nevis rotācijas) urbšanas režīms," saka Herkenhofs.
Curiosity ir neticami sarežģīts robots, kuru komanda joprojām mācās darboties. Tātad plāns uzreiz varētu mainīties.
Faktiskā urbšanas urbumu piegāde Curiosity’s CheMin un SAM analītiskajām laboratorijām joprojām ir vismaz vairākas dienas vai vairāk, un ir jāgaida pārbaudes urbuma rezultātu un turpmāko urbšanas testu rezultāti.
"Mēs piesardzīgi rīkojamies ar Curiosity pirmo urbumu," sacīja Daniels Limonadi, vadošais sistēmu inženieris Curiosity virsmas paraugu ņemšanai un zinātnes sistēmai NASA Jet dzinēju vilces laboratorijā (JPL). “Tas izaicina. Tā būs pirmā reize, kad kāds robots ir iedziļinājies klintī, lai savāktu paraugu uz Marsa. ”
Ar Sol 166 Curiosity nobrauca apmēram 3,5 metrus, lai sasniegtu Jāņa Kleina atsegumu, kuru komanda izvēlējās par 1. urbšanas vietu. Automašīnas izmēra roveris izmeklē seklu depresiju, kas pazīstama kā “Yellowknife Bay” - kur viņa ir atradusi plašus pierādījumus par atkārtotām epizodēm par seno šķidrās ūdens plūsmu netālu no viņas nosēšanās vietas Gales krātera tuvumā uz Marsa.
Paredzot ceturtdien plānoto urbšanas operāciju, roveris pirmdien (27. janvārī) vienkārši veica četru “priekšslodzes” testu sēriju, kuras laikā roveris novietoja urbjmašīnu uz Marsa virsmas mērķiem Džona Kleina atsegumā un nospieda uz leju. uz urbi ar robotizēto roku. Pēc tam inženieri pārbaudīja datus, lai noskaidrotu, vai pielietotais spēks sakrīt ar prognozēm.
"Roku nakti atstāja piespiestu vienai no tām, lai redzētu, kā spiediens mainījās līdz ar temperatūru," saka Herkenhofs.

Attēla paraksts: Curiosity robotizētā roka novieto robotizētās rokas rīka tornīti un Alfa daļiņu rentgenstaru spektrometra (APXS) instrumentu virs Džona Kleina atseguma, kas parādīts šajā foto mozaīkā, kas uzņemta ar kameru Mastcam 34 2013. gada 25. janvārī, vai Sol 168. Urbja uzgalis un spīles ir vērstas tieši uz instrumenta tornīti. Kredīts: NASA / JPL-Caltech / MSSS / Ken Krēmers / Marco Di Lorenzo
Tā kā Marsā katru dienu notiek milzīgas temperatūras svārstības (virs 65 ° C vai 115 F), komandai ir jānosaka, vai ir kāda iespēja, ka roka varētu radīt pārmērīgu stresu, kamēr tā spiež urbi uz Marsa virsmu. Dienas temperatūras svārstības var izraisīt tādu roveru sistēmu kā roka, šasija un pārvietošanās sistēmas izplešanos un saskari apmēram par desmit collu (apmēram 2,4 milimetriem), kas ir nedaudz vairāk par ASV ceturkšņa dolāru monētas biezumu.
"Mēs neplānojam atstāt sējmašīnu akmenī nakti, kad mēs sāksim urbšanu, taču, ja tas notiek, ir svarīgi zināt, ko sagaidīt no aparatūras radītā stresa," sacīja Limonadi. "Šis tests tiek veikts ar zemākām pirmsnoslodzes vērtībām, nekā mēs plānojam izmantot urbšanas laikā, lai ļautu mums uzzināt par temperatūras iedarbību, neapdraudot aparatūru."
Augstas izšķirtspējas MAHLI mikroskopiskais attēlotājs uz rokas tornīša uzņems tuvplānu pirms un pēc atseguma mērķa attēliem, lai novērtētu urbšanas operācijas panākumus.
Sol 175 modelī tiek plānota vēl viena nozīmīga darbība, kuras laikā viens no “tukšiem” organisko pārbaužu paraugiem, kas ievesti no Zemes, tiks nogādāts SAM instrumentā analīzei, lai pārbaudītu, vai nav nekādu organisko molekulu sauszemes piesārņojuma pēdas un vai paraugs netiek nodots Sistēma tika veiksmīgi iztīrīta misijas laikā Rocknest vēja pūsto smilšu pulsācijā.
Tikmēr pretējā Marsa pusē NASA Opportunity rover sāk 10. gadu, lai nekad agrāk nepieskartos philosilicate māla minerāliem, kas pirms mūžiem veidojās plūstošā šķidrā ūdenī Endeavour krāterī - sīkāk šeit.
Sekojiet līdzi aizraujošajiem NASA Marsa māsu rezultātiem.

Attēla paraksts: Skats uz Sharp kalnu no Curiosity pie Yellowknife līča un John Klein atseguma. Šī fotoattēlu mozaīka tika uzņemta ar kameru Mastcam 34 2013. gada 27. janvārī vai Sol 170. Kredīts: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer

Vietas Curiosity urbis slodzes pārbaudei pirms urbšanas. Perkusijas urbis instrumentu tornītī NASA Marsa rovera robotizētās rokas galā Curiosity šajā attēlā ir novietots saskarē ar klinšu virsmu no rovera priekšējās bīstamības novēršanas kameras (Hazcam). Kredīts: NASA / JPL-Caltech

Attēla paraksts: Pirms braukšanas uz Džona Kleina atsegumu labajā augšdaļā ziņkārība atrada plašus pierādījumus ūdens plūsmai ļoti daudzveidīgajās, akmeņainajās ainavās, kas parādītas šajā foto mozaīkā no Dzeltenkifejas līča malas Sol 157 (2013. gada 14. janvārī). Pēc tam rovers pārvietojās un tagad ir novietots uz līdzenām klintīm pie Džona Kleina atseguma un ir paredzēts veikt vēsturisko 1. Marsa iežu urbšanu šeit 2013. gada 31. janvārī. “John Klein” ir piepildīts ar daudzām minerālu vēnām, kas ļoti norāda uz nokrišņu nokrišņiem. minerāli no šķidra ūdens. Kredīts: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo