Tālāk ir fragments no manas jaunās grāmatas “Neticami stāsti no kosmosa: skats aizkulisēs uz misijām, kas maina mūsu skatu uz kosmosu”, kas tiks izdota rīt, decembrī. Grāmata ir ieskats vairākās pašreizējās izpausmēs. NASA robotizētās misijas, un šis fragments ir daļa no 3, kas šeit tiks ievietots Space Magazine, 2. nodaļā “Marsa kustība ar zinātkāri”. Grāmata ir pieejama pasūtīšanai vietnē Amazon un Barnes & Noble.
Septiņas terora minūtes
Apmēram septiņu minūšu laikā vidēja izmēra kosmosa kuģis - piemēram, roveris vai robotizēts landlers - nolaižas caur Marsa atmosfēru un sasniedz planētas virsmu. Šajās īsajās minūtēs kosmosa kuģim vajadzētu samazināties no tā degošā ienākošā ātruma aptuveni 13 000 jūdzes stundā (20 900 km / h), lai piezemētos ar ātrumu tikai 2 jūdzes stundā (3 km / h) vai mazāk.
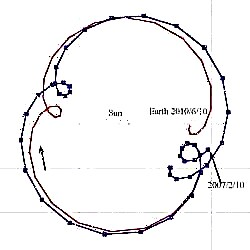
Lai to panāktu, Rubei Goldbergam līdzīgajai notikumu sērijai jānotiek perfektā secībā ar precīzu horeogrāfiju un laika grafiku. Un tam visam jānotiek automātiski, izmantojot datoru, bez ievades no Zemes. Kosmosa kuģi nav iespējams virzīt attālināti no mūsu planētas, apmēram 150 miljonu jūdžu (250 miljonu km) attālumā. Šajā attālumā radio signāla kavēšanās laiks no Zemes līdz Marsam ilgst vairāk nekā 13 minūtes. Tāpēc līdz septiņu minūšu nolaišanās beigām visi šie notikumi ir notikuši - vai nav notikuši - un neviens uz Zemes nezina, kurš no tiem. Vai nu jūsu kosmosa kuģis lieliski atrodas uz Marsa virsmas, vai arī atrodas avārijas kaudzē.

Tāpēc zinātnieki un inženieri no misijām uz Marsu to sauc par “septiņām terora minūtēm”.
Ar Mars Science Laboratory (MSL) misiju, kas 2011. gada novembrī tika uzsākta no Zemes, eksponenciāli palielinājās bailes un satraukums par to, ko oficiāli sauc par “iebraukšanu, nolaišanos un nolaišanos” (EDL). MSL piedāvā 1 tonnas (900 kg) sešriteņu roveru ar nosaukumu Curiosity, un šis rovers gatavojās izmantot pavisam jaunu, nemēģinātu nosēšanās sistēmu.
Līdz šim visi Marsa piezemētāji un maršrutētāji secībā ir izmantojuši iebraukšanu ar raķetēm, siltuma vairogu, lai aizsargātu un palēninātu transportlīdzekli, pēc tam izpletni, kam seko virzītāji, lai vēl vairāk palēninātu transportlīdzekli. Ziņkārība izmantotu arī šo secību. Tomēr pēdējais, izšķirošais elements ietvēra vienu no sarežģītākajām nosēšanās ierīcēm, kas jebkad ir lidojušas.

Pārdēvēts par “Sky Crane”, nolaižamā raķetes pakāpe nolaiž Rover uz Vectran virves 66 pēdu (20 metru) kabeļiem līdzīgi kā kāpjošs alpīnists, un roveris mīksti nolaižas tieši uz riteņiem. Tas viss bija jāpabeidz dažu sekunžu laikā, un, kad borta dators uztvēra pieskārienu, pirotehnika novirza virves, un nolaižamā nolaišanās pakāpe ar pilnu jaudu pietuvotos līdz avārijas zemei, kas atrodas tālu no Curiosity.
Sarežģot situāciju vēl vairāk, šis roveris mēģināja veikt visu laiku precīzāko nolaišanos ārpus pasaules, nolaižoties krāterī blakus kalnam, kas atrodas Raiena kalna augstumā.
Lielākā daļa nenoteiktības bija tā, ka inženieri nekad nevarēja pārbaudīt visu nosēšanās sistēmu kopā, secīgi. Un nekas nevarētu simulēt uz Marsa esošos brutālos atmosfēras apstākļus un vieglāku gravitācijas spēku, izņemot atrašanos uz paša Marsa. Tā kā reālā nosēšanās pirmo reizi tiks izmantota pilnībā aprīkotajam Sky Crane, radās jautājumi: kas notiks, ja kabeļi neatdalītos? Ko darīt, ja nolaišanās posms turpinātu nolaisties tieši virs rovera?
Ja Sky Crane nedarbosies, tas būs neveiksmīgs misijai, kas jau ir tik ļoti pārvarēta: tehniskas problēmas, kavējumi, izmaksu pārsniegšana un kritiķu sašutums, kuri teica, ka šis 2,5 miljardu dolāru lielais Marsa rovers iztukšoja naudu prom no pārējā NASA planētu izpētes programma.

Misijas uz Marsu
Marss ar savu sarkano mirdzumu nakts debesīs gadsimtiem ilgi ir aicinājis debesu vērotājus. Tā kā Zemei vistuvākā planēta piedāvā jebkādu potenciālu cilvēku nākotnes misijām vai kolonizācijai, tā ir izraisījusi lielu interesi kosmosa izpētes laikmetā. Līdz šim uz Sarkano planētu ir uzsāktas vairāk nekā 40 robotizētas misijas vai, precīzāk, 40 plus misijas. mēģināja.
Ieskaitot visus ASV, Eiropas, Padomju / Krievijas un Japānas centienus, vairāk nekā puse no Marsa misijām ir izgāzušās vai nu katastrofas palaišanas dēļ, nepareizas darbības dēļ ceļā uz Marsu, sabojāta mēģinājuma izslīdēt orbītā, vai katastrofālas nosēšanās dēļ. Kaut arī nesenajām misijām ir bijuši lielāki panākumi nekā mūsu pirmajiem pionieru mēģinājumiem izpētīt Marsu in situ (uz vietas) kosmosa zinātnieki un inženieri tikai daļēji pajoko, runājot par tādām lietām kā “Lielais galaktiskais vampīrs” vai “Marsa lāsts”, kas izjauc misijas.

Bet ir bijuši arī lieliski panākumi. Agrīnās misijas 60. un 70. gados, piemēram, Mariner orbītas un vikingu piezemētāji, parādīja mums pārsteidzoši skaisto, kaut arī neauglīgo un akmeņaino pasauli, tādējādi biedējot cerības uz “mazajiem zaļajiem vīriešiem” kā mūsu planētas kaimiņiem. Bet vēlākas misijas atklāja dihotomiju: krāšņa pamestība apvienojumā ar kārdinošiem mājieniem par pagātnes - vai varbūt pat mūsdienu - ūdeni un globālo darbību.
Mūsdienās Marsa virsma ir auksta un sausa, un atmosfēra, kas ir pilnīgi mierīga, neaizsargā planētu no saules starojuma bombardēšanas. Bet norādes ir apstākļi uz Marsa, kas ne vienmēr bija šāds. No orbītas redzami kanāli un sarežģītas ieleju sistēmas, kuras, šķiet, cirsts ar plūstošu ūdeni.
Gadu desmitiem ilgi planētu zinātnieki ir diskutējuši par to, vai šīs pazīmes izveidojās īsos, slapjos periodos, ko izraisīja kataklizmiski notikumi, piemēram, masīvs asteroīdu streiks vai pēkšņa klimata nelaime, vai arī vai tie veidojās miljoniem gadu laikā, kad Marss varēja būt nepārtraukti silts un mitrs. Liela daļa pierādījumu līdz šim ir neviennozīmīgi; šīs pazīmes varēja veidoties abpusēji. Bet pirms miljardiem gadu, ja tur būtu upes un okeāni, tāpat kā uz Zemes, dzīvība varētu būt savaldījusies.

Rovers
Automašīna Curiosity ir ceturtais mobilais kosmosa kuģis, ko NASA ir nosūtījusi uz Marsa virsmu. Pirmais bija 23 mārciņu (10,6 kg) roveris ar nosaukumu Sojourner, kurš 1997. gada 4. jūlijā nolaidās uz klintīm klātā Marsa līdzenumā. Apmēram mikroviļņu krāsns lielumā 2 pēdas (65 cm) garais Sojourner nekad netika cauri. atrodas vairāk nekā 40 pēdu attālumā no tā zemes un bāzes stacijas. Rovers un landlers kopā veidoja Pathfinder misiju, kurai bija paredzēts ilgt apmēram nedēļu. Tā vietā tas ilga gandrīz trīs mēnešus, un duets atdeva 2,6 gigabitus datu, uzņemot vairāk nekā 16 500 attēlus no zemētāja un 550 attēlus no rovera, kā arī veicot iežu un augsnes ķīmiskos mērījumus un pētot Marsa atmosfēru un laika apstākļus. Tas identificēja siltākas, mitrākas pagātnes pēdas Marsam.

Misija notika laikā, kad internets tikai ieguva popularitāti, un NASA nolēma tiešsaistē ievietot attēlus no rovera tiešsaistē, tiklīdz tie tika novirzīti uz Zemi. Tas beidzās ar vienu no lielākajiem notikumiem jaunā interneta vēsturē, kad NASA vietne (un spoguļvietnes, kas izveidotas pēc liela pieprasījuma) pirmajās 20 dienās pēc nosēšanās saņēma vairāk nekā 430 miljonus trāpījumu.
Arī Pathfinder izmantoja neparastu nosēšanās sistēmu. Tā vietā, lai virzuļus izmantotu, lai pieskartos virsmai, inženieri izveidoja milzu gaisa spilvenu sistēmu, lai ieskautu un aizsargātu kosmosa kuģi. Pēc parastās raķešu vadītas ieejas, karstuma vairoga, izpletņu un virzītāju sistēmas izmantošanas gaisa spilveni piepūstas un kokons ar zemi nokrita no 100 pēdām (30 m) virs zemes. Vairākas reizes atlecot pāri Marsa virsmas laikiem kā milzu pludmales bumba, Pathfinder galu galā apstājās, gaisa spilveni iztukšojās un zemējuma zona tika atvērta, lai roveris varētu izkļūt.
Lai arī tas varētu izklausīties kā traka nosēšanās stratēģija, tas darbojās tik labi, ka NASA nākamajai rover misijai nolēma izmantot lielākas gaisa spilvenu versijas: divus identiskus roverus, kuru nosaukums bija Spirit un Opportunity. Mars Exploration Rovers (MER) ir apmēram izjādes zāles pļāvēja izmērs, kura garums ir 5,2 pēdas (1,6 metri) un sver apmēram 400 mārciņas (185 kilogramus). Gars veiksmīgi nolaidās netālu no Marsa ekvatora 2004. gada 4. janvārī, un trīs nedēļas vēlāk Opportunity atlidoja uz otru planētas pusi. MER mērķis bija atrast pierādījumus par pagātnes ūdeni uz Marsa, un abi braucēji trāpīja uz džekpotu. Starp daudzajiem atradumiem Opportunity atrada senos klinšu atsegumus, kas izveidojās plūstošā ūdenī, un Gars atrada neparastus ziedkāpostu formas silīcija iežus, kurus zinātnieki joprojām pēta, taču tie var sniegt norādes par iespējamo seno Marsa dzīvi.

Neticami, ka pie šī raksta (2016) Opportunity rover joprojām darbojas, nobraucot vairāk nekā maratonu (26 jūdzes / 42 km), un tas turpina Marsa izpēti pie lielā krātera ar nosaukumu Endeavour. Gars tomēr piedzīvoja enerģijas zaudēšanu aukstajā Marsa ziemā 2010. gadā pēc iestrēgšanas smilšu traukā. Abi roveri ievērojami pārsniedza paredzamo 90 dienu dzīves ilgumu.
Kaut kādā veidā rovers katrs attīstīja atšķirīgu “personību” - vai, iespējams, labāks veids, kā izteikt, ir tas, ka cilvēki piešķirts personības pret robotiem. Gars bija problemātisks bērns un drāmas karaliene, bet viņam bija jācīnās par katru atklājumu; Iespēja, priviliģēta jaunākā māsa un zvaigzne, jo jaunie atklājumi viņai šķita viegli. Gars un Iespēja nebija veidoti kā burvīgi, taču burvīgie roveri aizrāva gan bērnu, gan pieredzējušu kosmosa veterānu iztēli. MER projekta vadītājs Džons Kallass savulaik dvīņu braucējus sauca par “smalkākajām un visdažādākajām lietām Saules sistēmā”. Tā kā ilgmūžīgie, noplukušie roveri pārvarēja briesmas un briesmas, viņi katru dienu sūtīja pastkartes no Marsa. Un Earthlings viņus mīlēja par to.
Ziņkārība
Lai gan tas jau sen ir mūsu kosmosa sarakstā, mēs vēl neesam izdomājuši, kā sūtīt cilvēkus uz Marsu. Mums ir vajadzīgas lielākas un modernākas raķetes un kosmosa kuģi, labākas tehnoloģijas tādām lietām kā dzīvības uzturēšana un pašu pārtikas audzēšana, un mums tiešām nav iespējas izkraut ļoti lielas kravas, kas vajadzīgas, lai izveidotu cilvēku apmetni uz Marsa.
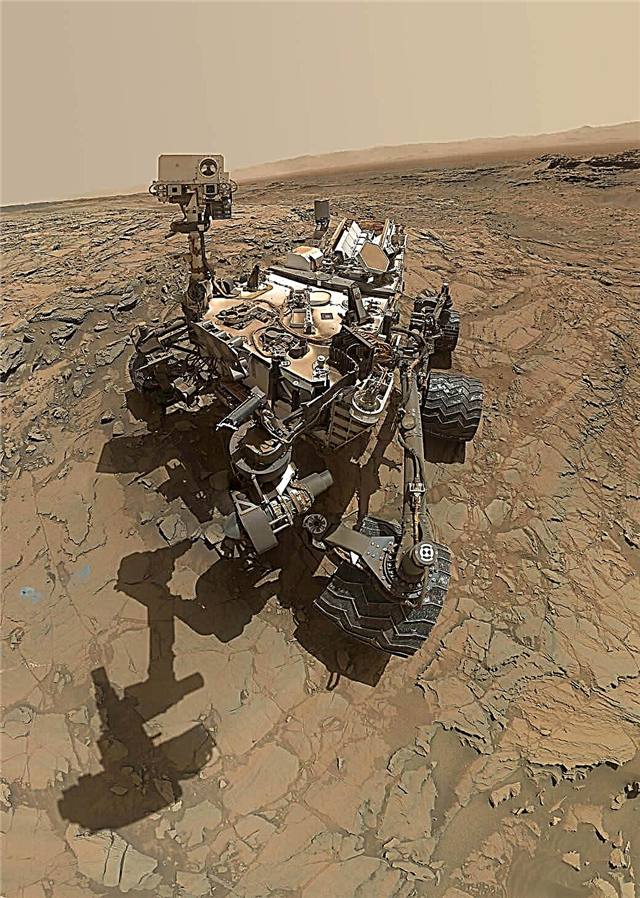
Bet pa to laiku - kamēr mēs cenšamies to visu izdomāt - mēs esam nosūtījuši uz Sarkano planētu cilvēka ģeologa robotu ekvivalentu. Automašīnas izmēra Curiosity roveris ir bruņots ar septiņpadsmit kameru masīvu, urbi, liekšķeri, rokas objektīvu un pat lāzeru. Šie rīki atgādina aprīkojumu, ko ģeologi izmanto, lai pētītu klintis un minerālus uz Zemes. Turklāt šis roveris imitē cilvēka aktivitātes, kāpjot kalnos, ēdot (tēlaini izsakoties), noliecot (robotizēto) roku un uzņemot pašbildes.

Šis rovingo robotu ģeologs ir arī mobilā ķīmijas laboratorija. Kopumā desmit roverā esoši instrumenti palīdz meklēt organisko oglekli, kas varētu norādīt uz dzīvībai nepieciešamajām izejvielām, un “sašņauc” Marsa gaisu, cenšoties saost, ja ir tādas gāzes kā metāns - kas varētu būt dzīvības pazīme. Curiosity robotizētajā rokā ir Šveices armijas sīkrīku nazis: palielināmajam objektīvam līdzīga kamera, spektrometrs ķīmisko elementu mērīšanai un urbis urbumu iekšienē un paraugu padeve laboratorijām ar nosaukumu SAM (Paraugu analīze Marsā) un) un CheMin (Ķīmija un mineraloģija). ChemCam lāzers var iztvaicēt iežu no 7 pēdu (23 pēdu) attāluma un identificēt minerālus no sprādzienbīstamās iedarbības izstarotās gaismas spektra. Laika stacija un radiācijas monitors noapaļo uz kuģa esošās ierīces.
Izmantojot šīs kameras un instrumentus, rovers kļūst par acīm un rokām starptautiskai komandai, kurā ir aptuveni 500 zemes zinātnieku.
Kamēr iepriekšējie Marsa braucēji izmantoja saules masīvus, lai savāktu saules gaismu enerģijas iegūšanai, Curiosity izmanto RTG, piemēram, New Horizons. No RTG saražotā elektrība atkārtoti darbina atkārtoti uzlādējamās litija jonu baterijas, un RTG siltums tiek iesūknēts arī rovera šasijā, lai salona elektronika būtu silta.
Ņemot vērā Curiosity izmēru un svaru, iepriekšējo roveru izmantotā gaisa spilvenu nosēšanās sistēma netika apskatīta. Kā paskaidroja NASA inženieris Robs Mannings, “jūs nevarat atlēkt kaut ko tik lielu”. Sky Crane ir pārdrošs risinājums.
Ziņkārības misija: izdomāt, kā Marss attīstījās miljardu gadu laikā, un noteikt, vai tas kādreiz bija vai pat tagad ir spējīgs atbalstīt mikrobu dzīvību.
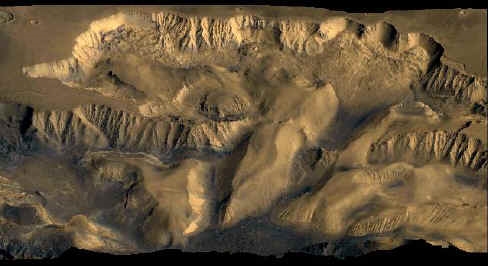
Ziņkārības izpētes mērķis: 3,4 jūdžu (5,5 km) augstie Marsa kalnu zinātnieki sauc Mt. Straujš (formāli pazīstams kā Aeolis Mons), kas atrodas Gale krātera vidū, 96 jūdžu (155 km) diametra trieciena baseinā.
Gale tika izvēlēta no 60 kandidātvietām. Kosmosa kuģa riņķojuma dati noteica, ka kalnam ir desmitiem nogulumiežu slāņu, iespējams, uzbūvēts miljoniem gadu. Šie slāņi varētu pastāstīt par Marsa ģeoloģisko un klimata vēsturi. Turklāt šķiet, ka gan kalnam, gan krāterim ir kanāli un citas iespējas, kas izskatās kā tos cirsts ar plūstošu ūdeni.
Plāns: MSL nolaidīsies krātera apakšējā, līdzenākajā daļā un uzmanīgi virzījās augšup kalna virzienā, izpētot katru slāni, būtībā iepazīstoties ar Marsa ģeoloģiskās vēstures laikmetiem.
Visgrūtākais būtu tur nokļūt. Un MSL komandai bija tikai viena iespēja to pareizi sakārtot.
Izkraušanas nakts
Ziņkārības izkraušana 2012. gada 5. augustā bija viens no gaidītākajiem kosmosa izpētes notikumiem nesenajā vēsturē. Miljoniem cilvēku vēroja notikumus, kas izvēršas tiešsaistē un televizorā, un sociālo mediju plūsmas rosījās ar atjauninājumiem. NASA TV kanāls no JPL misijas vadības tika tiešraidē pārraidīts uz ekrāniem Ņujorkas Laika laukumā un vietās visā pasaulē, kurās notiek “izkāpšanas ballītes”.
Bet darbības epicentrs atradās JPL, kur simtiem inženieru, zinātnieku un NASA amatpersonu pulcējās JPL Kosmosa lidojumu operāciju telpā. EDL komanda - visi valkā atbilstošus gaiši zilus polo kreklus - misijas kontrolē kontrolēja datoru konsoles.
Izcēlās divi komandas locekļi: EDL komandas vadītājs Ādams Steltzners - kurš nēsā matus Elvim līdzīgā pompadourā - pārvietojās uz priekšu un atpakaļ starp konsoli rindām. Lidojuma direktors Bobaks Ferdovskis bija sportisks un izsmalcinātas zvaigznes un svītras Mohawk. Acīmredzot divdesmit pirmajā gadsimtā eksotiskie matu griezumi ir aizstājuši 1960. gadu melnās brilles un kabatas aizsargus NASA inženieriem.

Nosēšanās laikā Ašvins Vasavada bija viens no visilgāk strādājošajiem zinātniekiem misijas komandā, un viņš pievienojās MSL kā projekta zinātnieka vietnieks 2004. gadā, kad roveris tika būvēts. Toreiz liela daļa Vasavada darba bija darbs ar instrumentu komandām, lai pabeigtu savu instrumentu mērķus, un tehnisko komandu uzraudzība, lai palīdzētu pilnveidot instrumentus un integrēt tos ar roveru.
Katrs no desmit atlasītajiem instrumentiem piesaistīja zinātnieku komandu, tāpēc kopā ar inženieriem, papildu personālu un studentiem simtiem cilvēku sagatavoja roveru palaišanai. Vasavada palīdzēja koordinēt katru lēmumu un izmaiņas, kas varētu ietekmēt zinātni, kas tiek veikta uz Marsa. Nosēšanās laikā viss, ko viņš varēja darīt, bija skatīties.
"Es atrados telpā blakus kontroltelpai, kuru rādīja pa televizoru," sacīja Vasavada. "Lai piezemētos, es neko nevarēju izdarīt, kā vien saprast, ka bijuši astoņi savas dzīves gadi, un visa mana nākotne bija jāšana pa šīm septiņām EDL minūtēm."
Turklāt fakts, ka neviens nezina rovera patieso likteni līdz 13 minūtēm pēc šī fakta, pateicoties radio kavēšanās laikam, JPL visiem radīja bezpalīdzības sajūtu.
"Lai gan es sēdēju krēslā," piebilda Vasavada, "es domāju, ka es biju garīgi krokaina augļa stāvoklī."
Kad Curiosity pietuvojās Marsam, trīs citi kosmosa veterāni, kas jau riņķoja ap planētu, pārvietojās stāvoklī, lai varētu sekot līdzi jaunpienācējam MSL, jo tas pārsūtīja informāciju par tā stāvokli. Sākumā MSL tieši sazinājās ar Deep Space Network (DSN) antenām uz Zemes.
Lai telemetriju no kosmosa kuģa padarītu pēc iespējas pilnveidotāku EDL laikā, Curiosity izsūtīja 128 vienkāršus, bet atšķirīgus signālus, norādot, kad nosēšanās procesa laikā tika aktivizētas darbības. Allen Chen, vadības telpas inženieris, paziņoja par katru atnākušo: viena skaņa norādīja, ka kosmosa kuģis ieiet Marsa atmosfērā; cits signalizēja, ka nošautie dzinēji virza kosmosa kuģi Gale krātera virzienā. Sākotnējos skaņdarbos misijas kontrolē klātesošie kliedzieni un smaidi, emocijām pastiprinoties, kosmosa kuģim virzoties tuvāk un tuvāk virsmai.
Daļēji nolaišanās laikā MSL devās zem Marsa horizonta, izslēdzot to no sakariem ar Zemi. Bet trīs orbiteri - Mars Odyssey, Mars Reconnaissance Orbiter un Mars Express - bija gatavi datu uztveršanai, reģistrēšanai un nodošanai DSN.

Vienmērīgi toņi turpināja ienākt uz Zemes, jo katrs nolaišanās solis nekļūdīgi turpinājās. Izpletnis izlikts. Karstuma vairogs nokrita. Signāls signalizēja, ka nolaišanās posms, kas ved roveru, izlaiž izpletni, cits norādīja lidojumu ar dzinēju un nolaižas virzienā uz virsmu. Cits signāls nozīmēja, ka Sky Crane sāka nolaist roveru uz virsmas.
Pienāca signāls, kas liecināja par Curiosity riteņu pieskārienu virsmai, bet pat tas nenozīmēja panākumus. Komandai bija jāpārliecinās, vai Sky Crane flyaway manevrs darbojas.
Pēc tam nāca signāls, ko viņi gaidīja: “Touchdown apstiprināts,” uzmundrināja Chen. "Mēs esam droši uz Marsa!"
Pandemonijs un prieks izcēlās JPL misijas kontrolē, piezemēšanās ballīšu vietnēs un sociālajos medijos. Likās, ka pasaule tajā brīdī tiek svinēta kopā. Izmaksu pārsniegšana, kavēšanās, visas negatīvās lietas, kas jebkad sacītas par MSL misiju, likās, ka pazudīs līdz ar nosēšanās triumfu.
“Laipni lūdzam Marsā!” reaktīvo dzinēju laboratorijas direktors Kārlis Elači preses konferencē pēc dramatiskā piezemēšanās sacīja: “Šovakar mēs piestājām, rīt sākam pētīt Marsu. Mūsu ziņkārībai nav robežu. ”

“Septiņas minūtes faktiski aizritēja ļoti ātri,” sacīja Vasavada. “Tas bija beidzies, pirms mēs to zinājām. Tad visi lēkāja augšup un lejup, kaut arī lielākā daļa no mums joprojām apstrādāja, ka tas gāja tik veiksmīgi. ”
Tas, ka piezemēšanās gāja tik labi - patiešām perfekti -, iespējams, patiesībā bija šokējis kādu JPL komandu. Kaut arī viņi bija vairākas reizes atkārtojuši Curiosity piezemēšanos, izcili, ka viņi nekad nespēja nolaisties transporta līdzeklī savās simulācijās.
"Mēs mēģinājām to atkārtot ļoti precīzi," sacīja Vasavada, "lai viss būtu sinhronizācijā - gan ar mūsu simulēto telemetriju, kas nāks no kosmosa kuģa, gan arī ar reāllaika animācijām, kas tika izveidotas. Tā bija diezgan sarežģīta lieta, taču tā faktiski nekad nedarbojās. Tātad reāla, faktiska nosēšanās bija pirmā reize, kad viss darbojās pareizi. ”
Ziņkārība tika ieprogrammēta, lai nekavējoties fotografētu apkārtni. Divu minūšu laikā pēc nolaišanās pirmie attēli tika novirzīti uz Zemi un parādījās JPL skates ekrānos.
"Mēs bijām ieplānojuši, ka orbītas izlidošanas laikā vajadzētu pārlidot, bet nezinājām droši, vai viņu releja savienojums ilgs pietiekami ilgi, lai sākotnējie attēli tiktu nolaisti," sacīja Vasavada. Šīs pirmās bildes bija diezgan trauslas, jo aizsargpārklāji joprojām atradās uz kamerām, un vilces spēks uz vāciņiem bija sakrājis daudz putekļu. Mēs to tiešām nevarējām redzēt ļoti labi, tomēr mēs tomēr lēkājām augšā un lejā, jo tie bija attēli no Marsa. ”
Pārsteidzoši, ka viens no pirmajiem attēliem parādīja tieši to, ko rovers bija nosūtīts studijām.
“Mēs bijām piezemējušies ar kamerām, kas galvenokārt vērstas tieši pie kalna. Asas, ”Vasavada sacīja, papurinādama galvu. “HazCam (bīstamu kameru) attēlā, tieši starp riteņiem, mums bija šis krāšņais kadrs. Tur bija kalns. Tas bija kā visas misijas priekšskatījums tieši mūsu priekšā. ”

Rīt: 2. daļa no “Roving Mars With Curiosity” ar “Living on Mars Time” un “Discoveries”
“Neticami stāsti no kosmosa: aizkulises skats uz misijām, mainot mūsu skatu uz kosmosu” ir publicējis Makmillanas meitasuzņēmums Page Street Publishing.