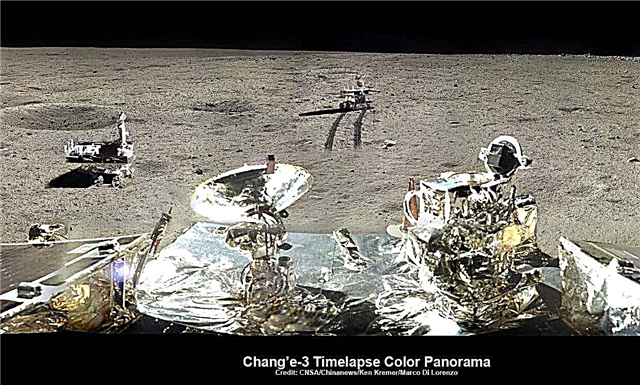
Chang’e-3 / Yutu Timelapse Color Panorama
Šis tikko paplašinātais timelapse kompozīcijas skats parāda Ķīnas Yutu mēness roveru divās pozīcijās, kas iet garām krāterim un virzās uz dienvidiem un prom no Chang'e-3 Mēness nosēšanās vietas uz visiem laikiem apmēram nedēļu pēc decembra. Skatiet pilnu 360 grādu nosēšanās vietas timelapse panorāmu šeit un APOD, 2014. gada 3. februāris. Chang'e-3 zemu ultravioletās (EUV) kameras ir labajā pusē, antena kreisajā pusē. Kredīts: CNSA / Chinanews / Kens Krēmers / Marko Di Lorenzo - kenkremer.com.
Skatiet mūsu pilnīgu Yutu timelapse pano NASA APOD 2014. gada 3. februārī: http://apod.nasa.gov/apod/ap140203.htm[/caption]
KENNEDY KOSMOSA CENTRS, FL - Ķīnas pirmslaulību mēness roveris Yutu piektdien, 14. martā, pamodās no sava regulārā divu nedēļu ilgā miega, lai sāktu 4. Mēness dienu kopš zondes vēstures, kas 2013. gada decembra vidū piezemēja Zemes tuvākā kaimiņa virsmu.
Tomēr mīlīgais robots joprojām cieš un cieš no mehāniskās vadības jautājumiem, kas 2014. gada janvāra beigās parādījās pēc Ķīnas kosmosa amatpersonu teiktā.
Chang’e-3 mātes kuģa nolaišanās, kas noguldīja Yutu uz apzīmētās Mēness virsmas, arī pamodās divas dienas agrāk, trešdien, 12. martā.
"Yutu un piezemētājs ir atsākuši operācijas un izpēte, kā paredzēts," saka Ķīnas Nacionālās aizsardzības zinātnes, tehnoloģijas un rūpniecības pārvalde (SASTIND), kas ir atbildīga par Chang’e-3 misijas izpildi.

Yutu ir Ķīnas pirmais Mēness apvidus autovadītājs, kurš 2013. gada 14. decembrī veiksmīgi veica mīkstu piezemēšanos uz Mēness un tika novietots uz Chang’e-3 māteskuģa krastmalas.
Tomēr “joprojām saglabājas kontroles jautājumi, kas Yutu satraukuši kopš janvāra,” saka Ķīnas valdībai piederošā ziņu aģentūra Siņhua.
Ļoti populārais “Yutu” apvidus auto joprojām cieš no nespējas manevrēt savu dzīvi, dodot saules paneļus. Tas arī nespēj aktivizēt savus sešus riteņus un pārvietoties pa virsmu - kā es šeit ziņoju.
Laikā, kad 2014. gada 25. janvārī sākās Yutu otrais Mēness miega periods, Ķīnas kosmosa amatpersonas bija paziņojušas, ka robota nākotne ir apdraudēta pēc tam, kad tā cieta neidentificētu “mehāniskās vadības anomāliju” “sarežģītās Mēness virsmas” dēļ.

Šā mēneša sākumā Ķīna paziņoja, ka “Yutu cieta vadības ķēdes darbības traucējumi savā piedziņas blokā”.
"Kontroles shēmas problēma neļāva Yutu iekļūt otrajā miega stāvoklī, kā plānots," ekskluzīvā intervijā Siņhua sacīja Chang’e-3 programmas galvenais zinātnieks Jejs Peidžians.
Funkcionējoša vadības ķēde ir nepieciešama, lai nolaistu roversu mastu un pasargātu uz masta uzstādītos delikātos komponentus un instrumentus no tiešas ciešanas no mēreni skarbajiem Mēness periodiskajiem nakts periodiem.
"Normālai miegainībai Yutu ir nepieciešams salocīt tā mastu un saules paneļus," sacīja Ye saskaņā ar Ķīnas valsts raidorganizācijas CCTV teikto.
Par laimi, panorāmas kamera, radars un citi zinātnes instrumenti un aprīkojums darbojas normāli, saka SASTIND.
Yutu 3. mēness dienas laikā pat uzņēma vismaz pāris jaunus zemnieka attēlus.
Skatiet mūsu Yutu Lunar Day 3 trešās puses attēla mozaīku, kā arī pilnīgu 360 grādu hronometrāžas krāsu panorāmu no šeit esošās Lunar Day 1 un NASA APOD 2014. gada 3. februārī - montējuši Marco Di Lorenzo un Ken Kremer.

Atmodas laikā 14. martā, 140 kg smagais robots arī izdzīvoja uz tā trīs mēnešus ilgā projektētā mūža uz Mēness.
Yutu mērķis ir veikt ekspedīciju, lai izpētītu Mēness virsmas sastāvu un dabas resursus.
Pagaidām 1200 kg smagais Chang’e-3 nosēšanās darbojas kā plānots pirmajās trīs Mēness dienās, vēsta SASTIND.
“Zemera optiskais teleskops, ekstrēmo ultravioleto staru kamera un Mēness putekļu mērīšanas ierīce pabeidza paredzētos uzdevumus un ieguva lielu datu daudzumu,” saka Ķīnas valdībai piederošā ziņu aģentūra Siņhua.
Ķīna ir tikai trešā valsts pasaulē, kas pēc Amerikas Savienotajām Valstīm un Padomju Savienības veiksmīgi mīkstina kosmosa kuģi uz Zemes tuvākā kaimiņa.
Sekojiet līdzi tam, kā Ken turpina Chang’e-3, Orion, Orbital Sciences, SpaceX, komerciālo kosmosu, LADEE, Mars un citas planētu un cilvēku ziņas par kosmosa lidojumiem. Uzziniet vairāk Kena gaidāmajās prezentācijās NEAF astro / kosmosa konvencijā 12. un 13. aprīlī.