NASA reaktīvo dzinēju laboratorija nesen paziņoja, ka tā izstrādā nelielu dronu helikopteru, lai meklētu ceļu nākamajiem Marsa roveriem. Kāpēc Marsa roveriem būtu vajadzīgs šāds robotizēts ceļvedis? Atbilde ir tāda, ka braukšana pa Marsu ir patiešām grūta.
Šeit, uz Zemes, robotus, kas pēta vulkāniskos apļus vai palīdz glābējiem, var vadīt ar tālvadības pulti, izmantojot kursorsviru. Tas notiek tāpēc, ka radio signāli robotu no tā vadības centra sasniedz gandrīz uzreiz. Braukšana uz Mēness nav daudz grūtāka. Radio signāli, kas pārvietojas gaismas ātrumā, ilgst apmēram divarpus sekundes, lai turpinātu lidojumu uz Mēnesi un atpakaļ. Šī kavēšanās nav pietiekami ilga, lai nopietni traucētu braukšanu ar tālvadības pulti. 1970. gadu padomju kontrolieri šādā veidā brauca ar Lunokhod mēness roveriem, veiksmīgi izpētot vairāk nekā 40 km Mēness reljefu.
Braukšana uz Marsa ir daudz grūtāka, jo tā atrodas tik tālu. Atkarībā no tā stāvokļa attiecībā pret Zemi, turp un atpakaļ signāli var ilgt no 8 līdz 42 minūtēm. Iepriekš ieprogrammēti norādījumi ir jānosūta roverim, kuru tas pēc tam izpilda pats. Katrs Marsa brauciens prasa stundām ilgas rūpīgas plānošanas. Inženieri rūpīgi pārbauda stereo attēlus, ko uzņem rovera navigācijas kameras. Attēli no kosmosa kuģiem, kas riņķo ap Marsu, dažreiz sniedz papildu informāciju.
Roveru var ieprogrammēt, lai tas vienkārši izpildītu no Zemes nosūtīto braukšanas komandu sarakstu, vai arī tas var izmantot attēlus, kurus uzņēmis tās navigācijas kameras un apstrādājuši tā borta datori, lai izmērītu ātrumu un pats atklātu šķēršļus vai apdraudējumus. Tas pat var iezīmēt savu drošo ceļu uz noteiktu mērķi. Ātrākie ir braucieni, kuru pamatā ir norādījumi no zemes.
Marsa izpētes Rovers gars un iespējas šādā veidā stundā varētu nobraukt līdz 124 metriem. Tas atbilst aptuveni amerikāņu futbola laukuma garumam. Bet arī šis režīms bija vismazāk drošs.
Kad roveris aktīvi vada sevi ar savām kamerām, progress ir drošāks, bet visu vajadzīgo attēlu apstrādes dēļ daudz lēnāks. Tas var progresēt tikai par 10 metriem stundā, kas ir apmēram attālums no vārtu līnijas līdz 10 jardu līnijai Amerikas futbola laukumā. Šī metode jāizmanto ikreiz, kad roverim nav skaidra priekšstata par turpmāko maršrutu, kas bieži notiek nelīdzena un kalnaina reljefa dēļ.
Kopš 2015. gada sākuma tālākais Curiosity vienas dienas laikā ir nobraucis līdz 144 metriem. Opportunity garākais ikdienas brauciens dienā bija 224 metri, kas bija attālums starp diviem Amerikas futbola laukumiem.
Ja zemes kontrolieri varētu iegūt labāku priekšstatu par turpmāko ceļu, viņi varētu izstrādāt instrukcijas, kas nākamajam roverim ļautu dienā droši braukt daudz tālāk.
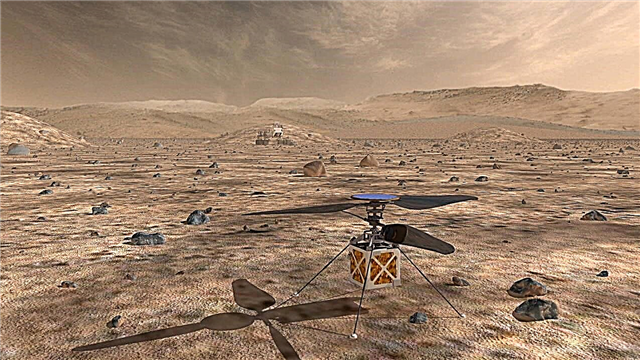
Šeit rodas ideja par helikoptera dronu. Helikopters katru dienu varētu izlidot pirms rovera. Attēli, kas izgatavoti no tā antenas punkta, zemes kontrolieriem būtu nenovērtējami, lai noteiktu zinātniski nozīmīgus punktus un plānotu braukšanas maršrutus, lai tur nokļūtu.
Lidošana ar helikopteru uz Marsu rada īpašas problēmas. Viena priekšrocība ir tā, ka Marsa gravitācija ir tikai 38% tik spēcīga kā Zemei, tāpēc helikopteram nevajadzēs radīt tik daudz pacēlāju kā vienai un tai pašai masai uz Zemes. Helikoptera dzenskrūves lāpstiņas rada pacelšanu, virzot gaisu uz leju. To ir grūtāk izdarīt uz Marsa nekā uz Zemes, jo Marsa atmosfēra ir simts reizes plānāka. Lai izspiestu pietiekami daudz gaisa, dzenskrūves asmeņiem vajadzētu ļoti ātri griezties vai būt ļoti lieliem.
Kopterim jāspēj patstāvīgi lidot, izmantojot iepriekšējus norādījumus, saglabājot stabilu lidojumu pa iepriekš noteiktu maršrutu. Tam vairākkārt jānolaižas un jāpaceļ akmeņainā Marsa reljefā. Visbeidzot tai jābūt spējīgai izdzīvot skarbajos Marsa apstākļos, kur temperatūra katru nakti pazeminās līdz 100 grādiem pēc Fārenheita vai zemāka.
JPL inženieri projektēja kopētāju ar masu 1 kilograms; niecīga daļa no Curiosity rover 900 kg masas. Tā dzenskrūves asmeņi atrodas 1,1 metru attālumā no lāpstiņas gala līdz lāpstiņas galam un ir spējīgi griezties ar ātrumu 3400 griešanās minūtē. Ķermenis ir apmēram audu kastes izmērs.
Kopterim ir saules enerģija, un saules bateriju disks katru dienu savāc pietiekami daudz enerģijas, lai nodrošinātu lidojumu divu līdz trīs minūšu laikā un sildītu transportlīdzekli naktī. Tajā laikā tas var lidot apmēram puskilometru, savācot attēlus, lai to pārnestu uz zemes kontroli. Inženieri sagaida, ka iepazīšanās ar dronu kopētāju būs nenovērtējama, plānojot rovera piedziņu, trīskāršojot dienu nobraukto attālumu.
Atsauces un turpmākā lasīšana:
Paldies Markam Maimonam no NASA reaktīvo dzinēju laboratorijas par informāciju par ziņkārības un iespēju ikdienas braukšanas attālumiem.
J.J. Biesiadecki, P. C. Leger un M. W. Maimone (2007), “kompromisi starp virzītu un autonomu braukšanu uz Marsa izpētes roveriem”, The International Journal of Robotics Research, 26 (1), 91–104
E. Hovela, Opportunity Mars rover dodas tālāk par 41 kilometru virzienā uz “Marathon Valley”, Space Magazine, 2014. gada decembris.
T. Rejs, neticams ceļojums, Mars Curiosity maršrutētājs sasniedz Šarpa kalna bāzi. Žurnāls “Kosmoss”, 2014. gada septembris.
Helikopters varētu būt “skauts” Marsa braucējiem. NASA reaktīvo dzinēju laboratorijas paziņojums presei. 2015. gada 22. janvāris.
Crazy Engineering: Marsa helikopters. NASA reaktīvo dzinēju laboratorijas video.
Ziņkārība - Marsa zinātnes laboratorija, NASA.
Marss - nākotnes rovera plāni. NASA